

Authors:
(1) Mehdi Naderi;
(2) Markos Papageorgiou;
(3) Dimitrios Troullinos;
(4) Iasson Karafyllis;
(5) Ioannis Papamichail.
Table of Links
The Nonlinear Feedback Control
OD Corridors and Desired Orientations
Boundary and Safety Controllers
Appendix A: Collision Detection
Appendix B: Transformed ISO-Distance curves
Appendix D: Safety Controller Details
Appendix E: Controller Parameters
Abstract— Controlling automated vehicles on large lane-free roundabouts is challenging because of the geometrical complexity and frequent conflicts among entering, rotating, and exiting vehicles. This paper proposes a comprehensive methodology to control the vehicles within the roundabout and the connected road branches. The developed real-time vehicle movement strategy relies on offline-computed wide overlapping movement corridors, one for each Origin-Destination (OD) movement, which delineate the admissible movement zones of corresponding OD vehicles. Also, space-dependent desired orientations are determined by destination, so as to mitigate potential vehicle conflicts and reduce trip distance. A distributed (per vehicle) movement control strategy, using two nonlinear feedback controllers (NLFC), for circular and straight movements, respectively, is employed to navigate each vehicle within the respective OD corridor toward its destination, accounting for the desired orientation and avoiding collisions with other vehicles; while boundary controllers guarantee that the corridor boundaries will not be violated, and the exit will not be missed. As an overly complicated case study, we consider the famous roundabout of Place Charles de Gaulle in Paris, featuring a width of 38 m and comprising a dozen of bidirectional radial streets, hence a total of 144 ODs. The pertinence and effectiveness of the presented method is verified via microscopic simulation and evaluation of macroscopic data.
Index Terms— automated vehicles, lane-free traffic, microscopic simulation, nonlinear feedback controller
I. INTRODUCTION
To address the issues caused by traffic congestion, such as travel delays, environmental degradation, and decreased traffic safety, various methods of traffic control have been developed and partly employed in the past decades [1], [2]. More recently, a wide variety of Vehicle Automation and Communication Systems (VACS) have been developed that tremendously improve vehicles’ individual capabilities, enabling a new generation of potential traffic management tools [3], [4]. This tendency is continuing with the emergence of high-automation or nearly driverless vehicles which are tried out in real traffic environments, see e.g. [5]. In the not-too-far future, vehicles may communicate with each other and with the infrastructure; and drive automatically, based on own sensors, communications, and appropriate movement control strategies.
Recently, the TrafficFluid concept, a novel paradigm for vehicular traffic, which applies at high levels of vehicle automation and communication was proposed [6]. The TrafficFluid concept relies on two combined principles: (a) Lane-free traffic, whereby vehicles are not bound to fixed traffic lanes, as in conventional traffic, but may drive anywhere on the 2-D surface of the road; and (b) Vehicle nudging, whereby vehicles communicate their presence to other vehicles in front of them (or are sensed by them), and this may influence the movement of vehicles in front. Over the last couple of years, several movement strategies were proposed for autonomous vehicles on lane-free infrastructure under the TrafficFluid paradigm, using different methodologies, including: ad-hoc strategies [6], [7], optimal control [8], [9], reinforcement learning [10], nonlinear feedback control [11], [12]; and a generic simulation environment for lane-free traffic has also been developed [13]; see [14] for a brief review.
In a remarkable keynote presentation [15], Luc Julia mentioned two reasons why driverless vehicles may never be a reality, one of them being the intricate Place Charles de Gaulle roundabout in Paris, depicted in Fig. 1, which is too complex for automated vehicles (AV) to navigate. This famous roundabout is 38 m wide, with an outer radius of 84 m and an inner radius of 46 m. It comprises a dozen bi-directional radial streets, i.e., 144 distinct origin-destination (OD) movements for the vehicles. Given this complexity, this road infrastructure is operating without lanes; therefore, once on the roundabout, human drivers must find their way without adhering to any traffic lanes. Luc Julia's statement provided us with the motivation to address the challenge and contemplate the Place Charles de Gaulle roundabout, which is anyhow a lane-free infrastructure, as a case study for the TrafficFluid concept, i.e., to develop a vehicle movement strategy for AV that may populate and drive on such complex roundabouts, as reported in this paper.
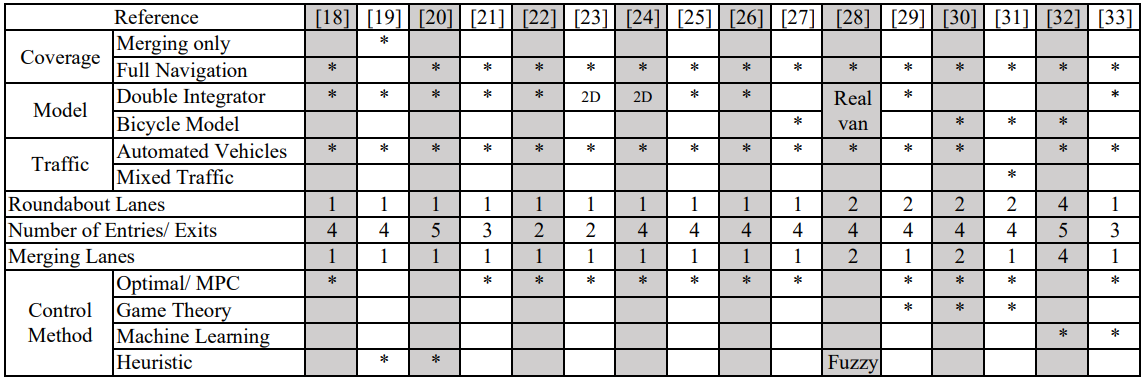
Roundabouts are a key element of urban traffic, allowing for more efficient flow at light traffic [17]; but may become a bottleneck point in higher demands. Therefore, successful management of roundabouts, which is considered difficult due to their complexity, may improve the flow of traffic in the surrounding area. There are several works in the literature that focus on AV driving on roundabouts [18]-[33]. A classification of the existing methods, based on some important features, is
![Fig.1. Place Charles de Gaulle roundabout [16]](https://cdn.hackernoon.com/images/fWZa4tUiBGemnqQfBGgCPf9594N2-n783zrf.png)
given in Table I. The majority of the reported works appear to focus on simple roundabouts that do not come close to the complexity of this paper's case study. Particularly, most of them concentrate on single or double-lane roundabouts with a limited number of radial streets.
A preliminary report of early results on lane-free roundabouts involving a control scheme for AV and application to the roundabout of Place Charles de Gaulle (Paris) was presented in [34]. Therein, a nonlinear feedback controller, developed in [11] for vehicles moving on straight lane-free roads, was employed to control vehicles on the roundabout. In addition, in [35], we developed an optimal control approach minimizing a weighted sum of the trip distance and the deviation from the circular motion to determine desired orientations on large roundabouts, to replaces the heuristic method used in [34].
In this paper, we extend and improve the strategies presented in [34] in many significant aspects to provide safe and convenient vehicle movements as well as an acceptable throughput, especially in high-density situations. Firstly, a new nonlinear controller, designed for ring-roads in [12], is employed to control vehicles while moving on the roundabout, which is more appropriate than modifying the straight-road controller, as done in [34]. Secondly, a suboptimal online approach, presented in [35], is utilized to determine the desired vehicle orientations. Furthermore, some additional considerations, like adaptive desired speed based on the local density as well as a longitudinal safety controller are introduced
to ensure: (i) suitable performance in highly crowded situations; and (ii) good exploitation of the infrastructure and high throughput at all density levels. While designing the movement strategy, we have at parts tried to imagine logical human decisions, and followed them, if they proved efficient. A video of microscopic simulation for the Charles de Gaulle roundabout using the presented approach is available at https://bit.ly/36exR42. Finally, macroscopic data are used to evaluate the traffic-level effectiveness of the presented methodology.
The rest of the paper is as follows. Section II explains the vehicle dynamics and the transformations for circular and skewed movements. The nonlinear controllers used for straight and circular paths are presented in Section III. Section IV describes the designed OD corridors and desired orientation approach. Boundary and safety controllers are presented in Section V. Simulation results are presented in Section VI. Concluding remarks are given in Section VII. Some side issue details are provided in four Appendices.
This paper is available on arxiv under CC 4.0 license.